Run Demo
Pre-checks
Ensure that you have:
- Installed the required software on your PC
- Configured the tracelet parameters
- Connected the tracelet to the LTE/Wi-Fi router
- Mounted the tracelet on the vehicle
- Powered the tracelet and router via the external power bank
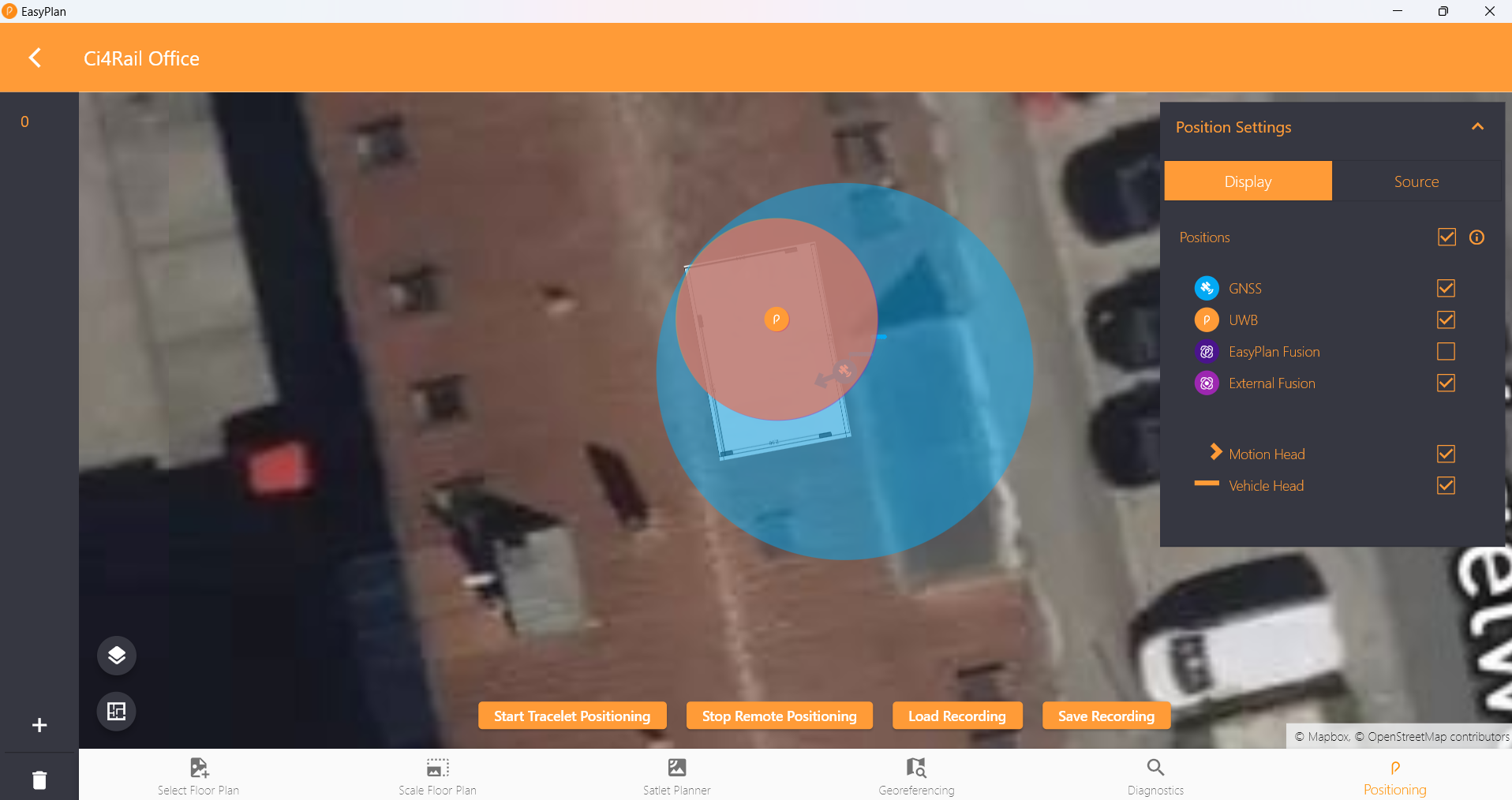
Verify positioning in Easyplan
- Open Easyplan and select your site (building).
- Click the Positioning icon (bottom-right) and choose Start Remote Positioning.
- Confirm that the vehicle position appears on the map.
Easyplan visualizes three positions:
- Orange – UWB subsystem
- Blue – GNSS subsystem
- Purple – Fused position
Check quality metrics in Grafana
Open http://localhost:3000 and navigate to the Single Tracelet Details dashboard. Review the key metrics:
| Metric | Description |
|---|---|
| Wi-Fi strength | Signal strength reported by the tracelet along with the last bytes of the connected AP MAC address. |
| Connected to localization server | Indicates whether the tracelet communicates with the localization server (your PC). |
| Missing ACKs from localization server | Highlights weak connections when acknowledgements are missing. |
| Connected to NTRIP caster | Shows if correction data is received from the configured NTRIP source. |
| Sensor fusion state | Reports which subsystem currently feeds the fused position (UWB or GNSS). |
| GNSS/Satellites in view | Number of satellites per constellation. |
| GNSS/Reference station | ID of the GNSS reference station in use. |
| GNSS/Sensor fusion status | Indicates whether the GNSS fusion algorithm is active. |
| GNSS/Programmable gain amplifier | Current gain setting used by the GNSS receiver. |
| GNSS/Heading | Heading of motion and vehicle from GNSS. |
| GNSS/Fix type | Fix type (2D, 3D, RTK, etc.). |
| GNSS/Boot type | Type of the last GNSS boot (cold, backup, software). |
| GNSS/Accuracy | Estimated accuracy of the GNSS fix in metres. |
| GNSS/Speed | Speed reported by the GNSS subsystem. |
| UWB/Fix type | Current UWB fix type (UWB or DR). |
| UWB/X/Y position | Planar position reported by the UWB subsystem. |
| UWB/Horizontal position error | Horizontal position error reported by UWB. |
| UWB/Position validity | Indicates whether the current UWB position is valid. |
| Tacho/Vehicle speed | Speed derived from the wheeltick signal. |
| Tacho/Mileage | Distance travelled based on wheeltick input. |
| Ignition | Vehicle ignition status. |
Test drive scenarios
GNSS positioning
- Park the vehicle with an unobstructed sky view and wait a few minutes.
- Confirm the blue GNSS marker in Easyplan.
- In Grafana, verify:
Connected to NTRIP Casteris trueGNSS/Fix typereports RTKGNSS/Satellites in viewshows more than 25 satellites in useGNSS/Accuracyis below 1 m
- Drive several hundred metres, including straight segments and curves.
- Check Grafana metrics:
Tacho/Vehicle speedmatches the actual speedGNSS/Sensor fusion statusequals FUSION
- In Easyplan, confirm that the recorded track matches the driven route.
UWB positioning
Drive into the UWB-covered area. The orange marker should appear in Easyplan.
Handover from UWB to GNSS
When moving from UWB coverage to open sky, the UWB track continues until accuracy degrades. Once GNSS is reliable again, the fused (purple) position transitions to GNSS.
Info
The current UWB dead-reckoning implementation stops when vehicle speed falls to zero and resumes when speed increases.
Handover from GNSS to UWB
Driving from open sky into the UWB-covered area keeps the GNSS track alive until UWB becomes available. The fused position then switches to the UWB solution.